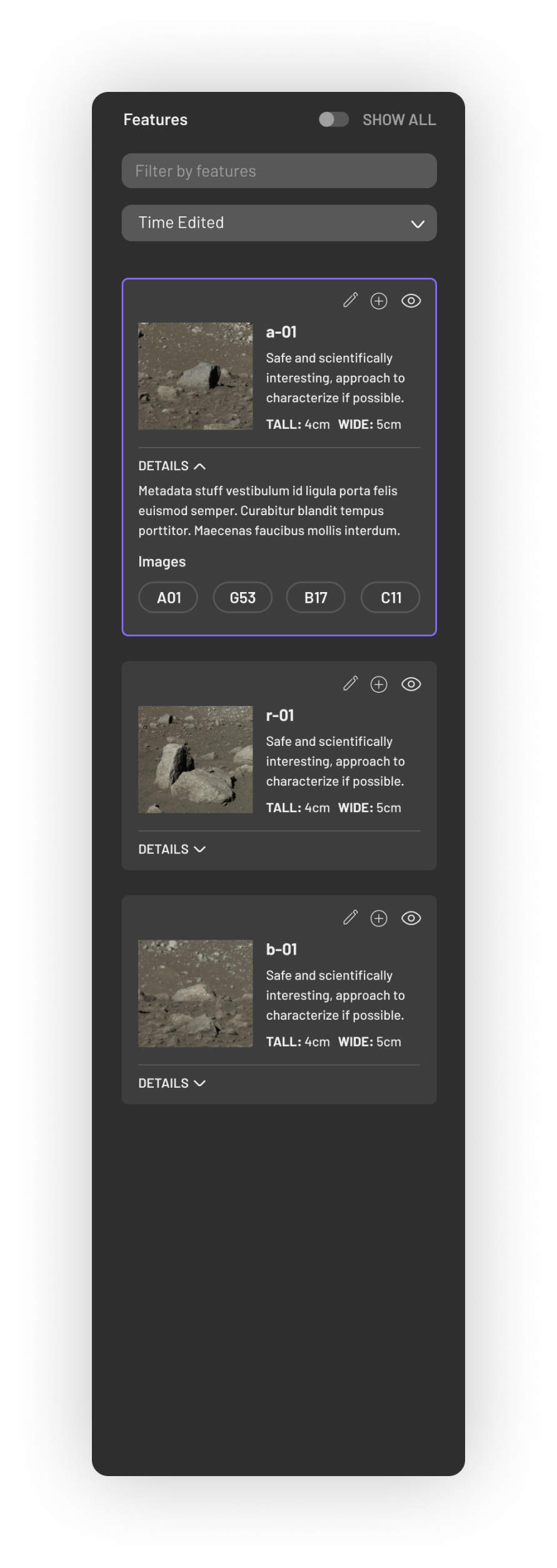
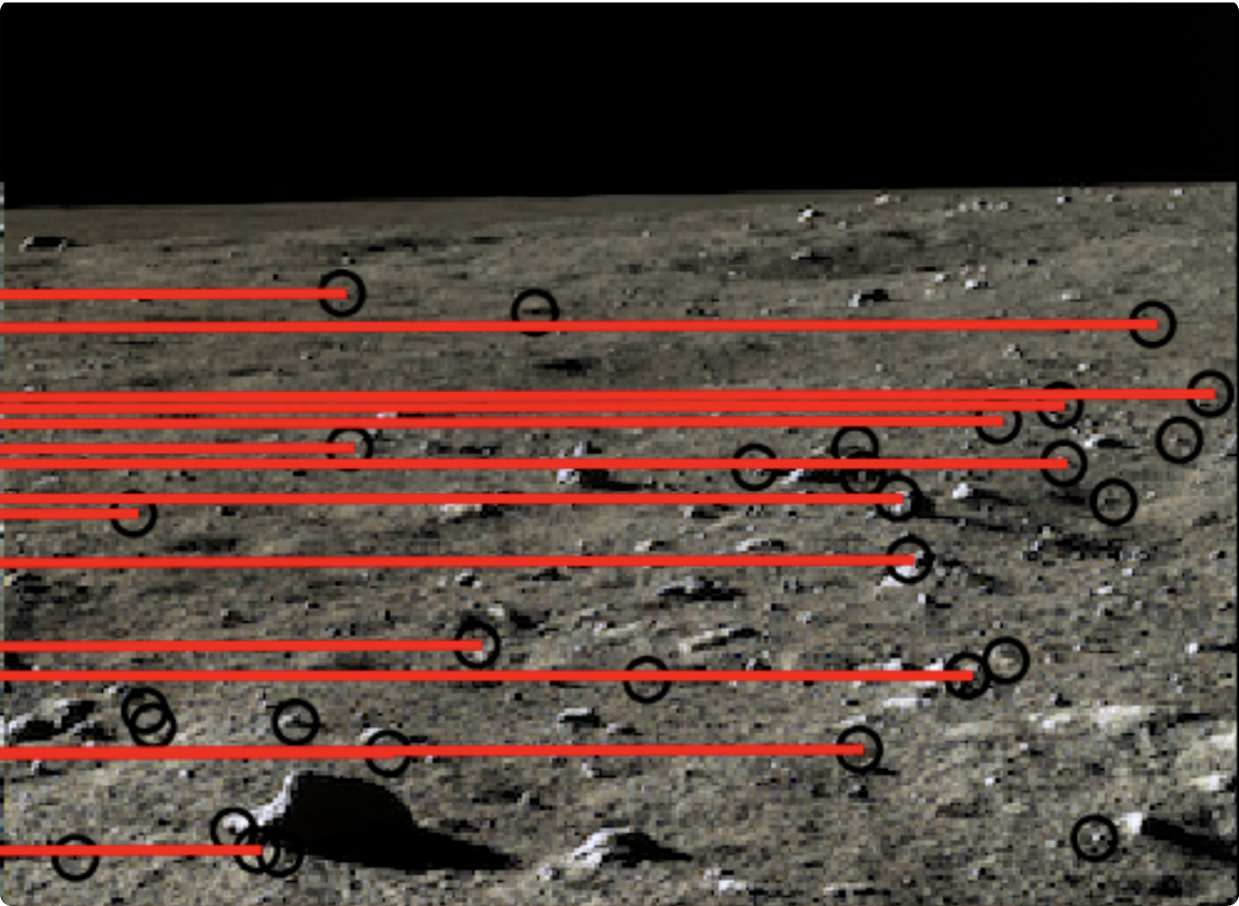
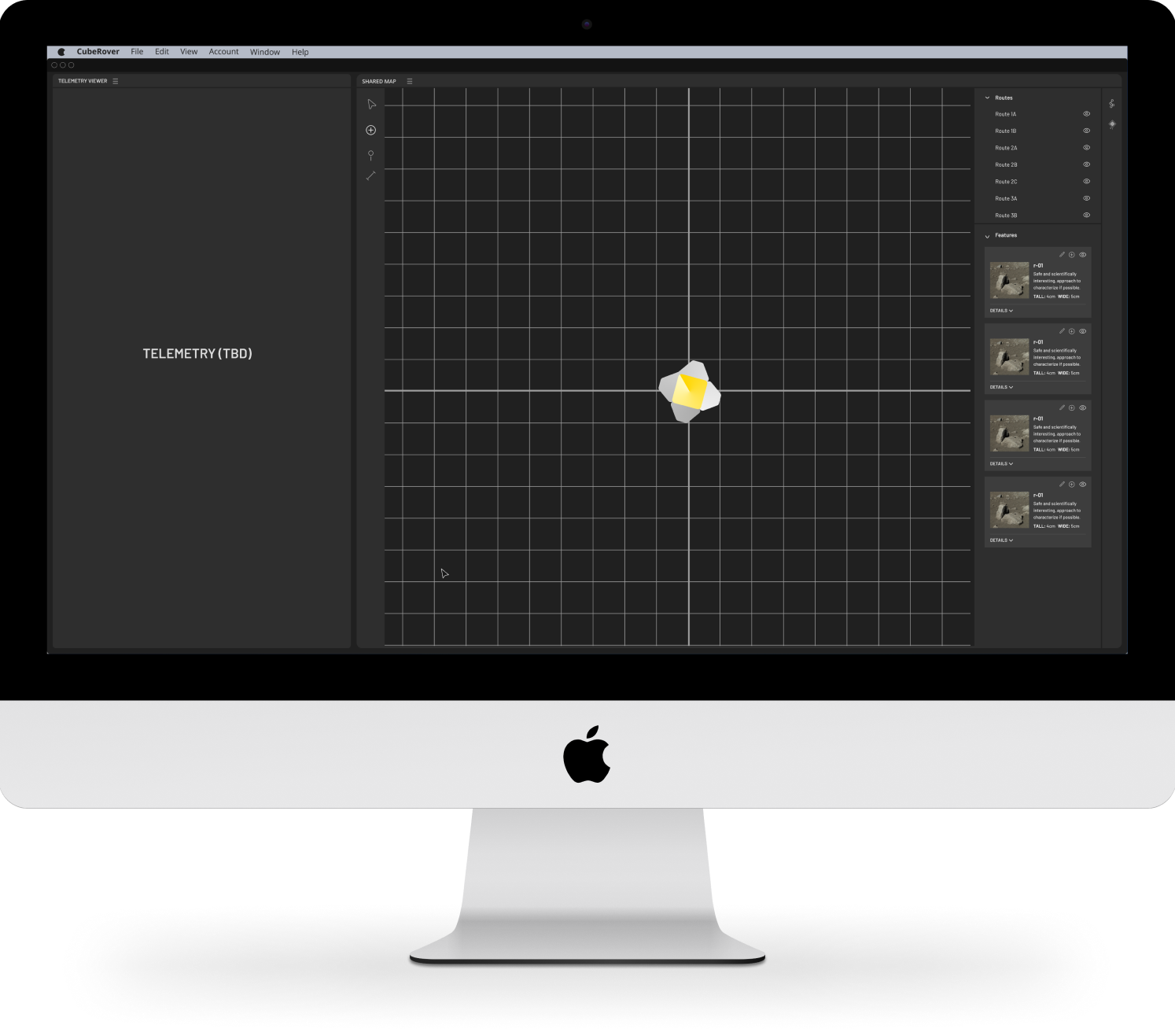
Image software for lunar scientists
Lunar rover imaging software that aids researchers to navigate and identify scientific discoveries on the Moon

CLIENT:
Astrobotic, NASA
SKILLS:
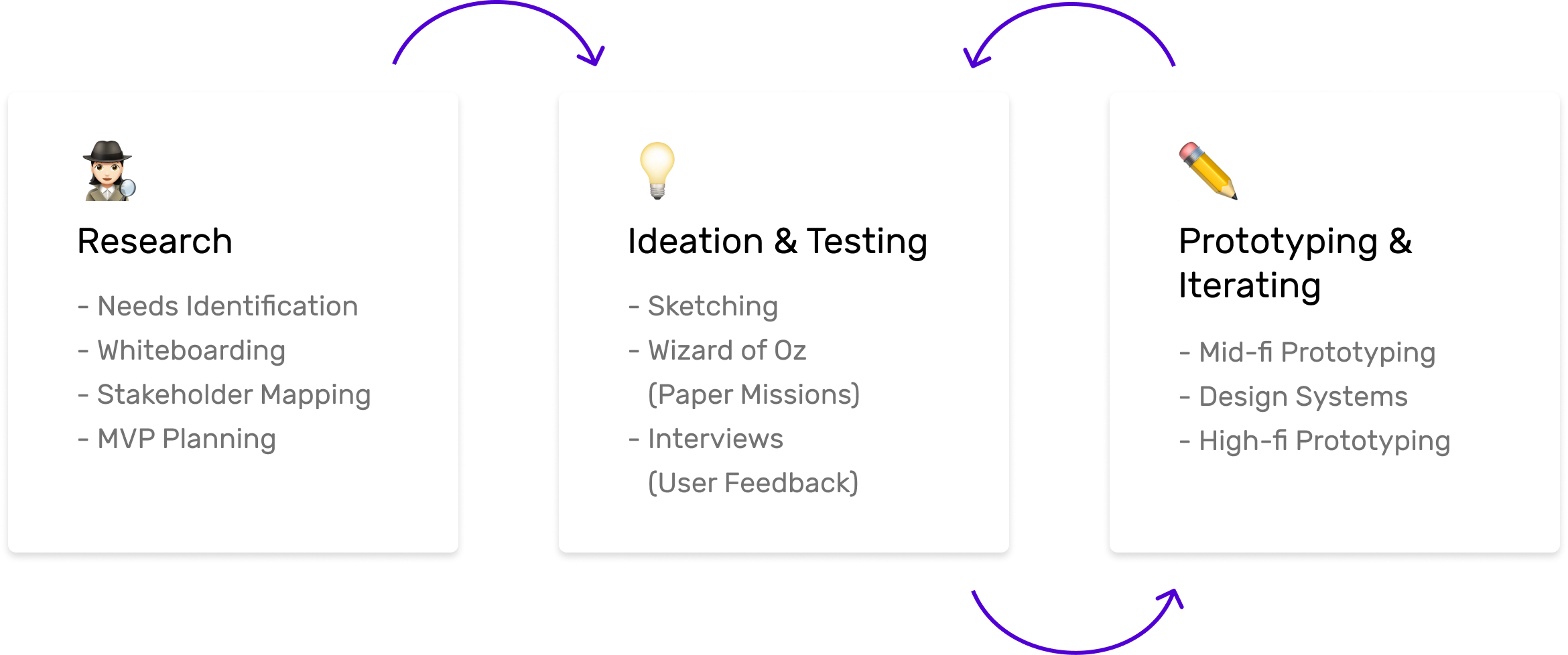
Wizard of Oz, Concept Testing, Product Design
DURATION:
5 months
TEAM:
1 Project Manager, 3 Designers